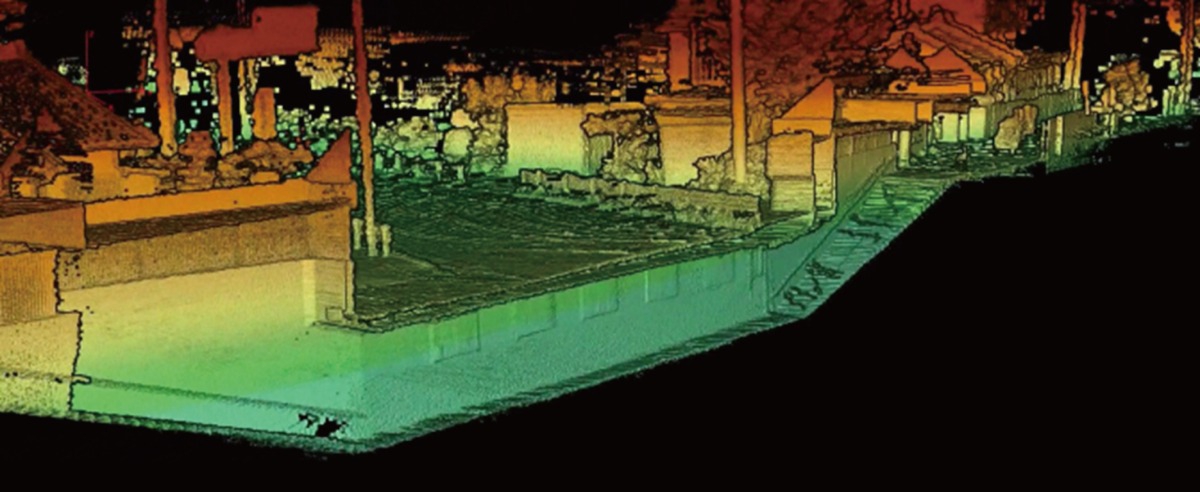
GNSSフリーでどこでも簡単に3次元データが作成可能!
「SLAM計測」はGNSSが不要な、点群取得&3Dマッピングを行う技術です。
- GNSSフリー!屋外はもちろん、屋内でも計測可能
- 点群ビューワソフト「Mierre(ミエール)」で、素早く簡単に可視化
- 他のレーザ機器で取得した既存3次元データと合成可能

活用事例
- 各種調査、施設設備管理、変化抽出など実績多数!
- 地下や屋内などGNSS受信不可能な場所でも3次元点群が取得可能!
- 3次元点群データの作成が可能!
■事例1:地下道とその周辺環境など、地上と地下を同時に計測したい!
GNSS不要のため、地上と地下を同時に計測することができます。 計測が複数回に分かれても、継ぎ目なく合成することも可能です。 都市計画や防災対策に必要な都市部の3次元情報を効率よく取得できます。 |
■事例2:2時期の差分を抽出したい!
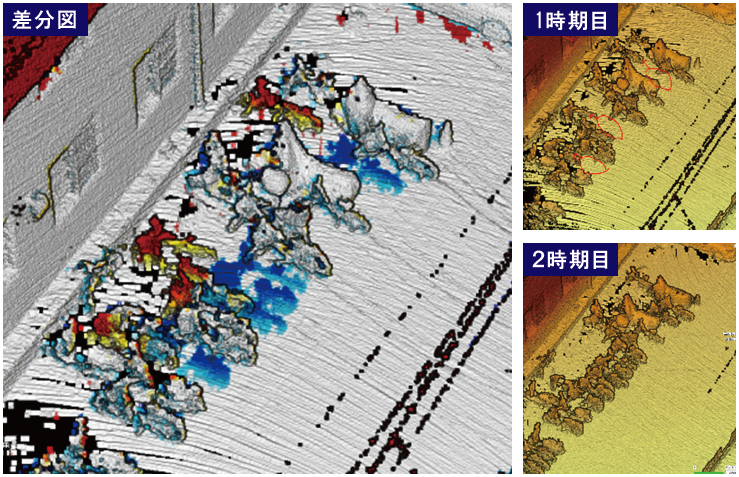
同じ場所を時期を変えて計測することで、差分を抽出します。 現地での作業時間が短いため、複数回計測しても、コストを抑えた調査が可能です。 工事の作業進捗や、物体の移動状況などの把握に役立ちます。 |
■事例3:森林や遺跡を計測したい!
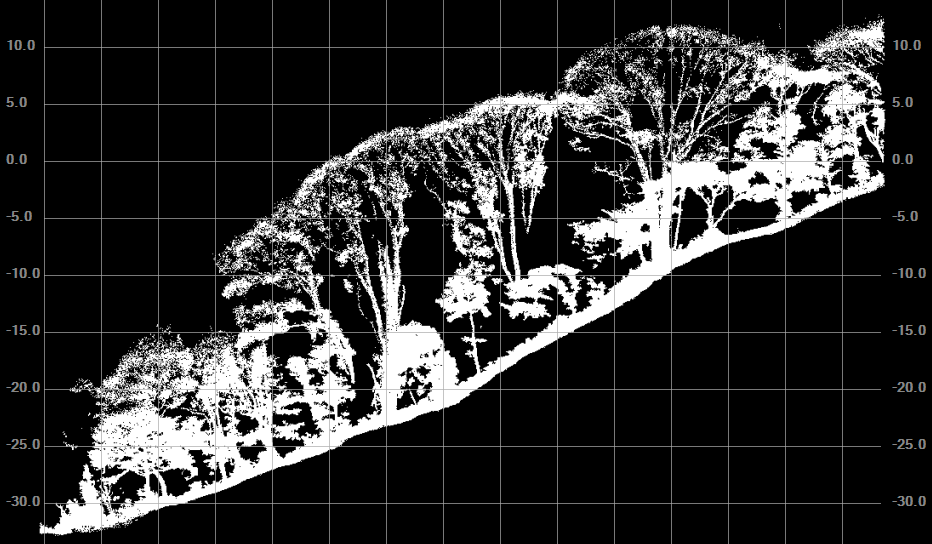
これまで調査が難しかった樹木下での計測が可能で、 空からの調査の補強や、代替として利用ができます。 林業では、胸高直径、樹高、下草の調査などに。 遺跡調査では、山地に分布する石垣や、遺構のスケッチ代わりに利用可能です。 |
■関連項目
- 自動運転
- 施設計測
- 設備管理
- 登山道3D計測
機材仕様

|

|
コラム ~SLAMとは?~

SLAM(Simultaneous Localization and Mapping;自己位置推定と環境地図作成の同時実行)とは、レーザ点群の特徴点をマッチングして、自己位置と点群を同時に推定する技術です。 ロボット工学の世界で発展した技術で、お掃除ロボットや自動運転で使われています。 |